At Lynx, we see the support of standards for mission-critical systems as just the start. That is because APIs don’t define system behavior and timing. This thoughtful piece by our CTO, Will Keegan, shares more details about the challenges facing system architects who create deterministic systems for deployment in military and avionics platforms.
The U.S. Department of Defense’s (DoD) Modular Open Systems Approach (MOSA) aims to design systems with highly cohesive, loosely coupled, and severable modules that can be competitively sourced from independent suppliers. Frank Kendall, US Air Force Secretary, highlighted this importance as a key element regarding the Next Generation Air Dominance (NGAD) aircraft. MOSA calls out support for suppliers to be Future Airborne Capability Environment (FACE) conformant, which Lynx has fully embraced with certificates of conformance for Arm, PowerPC, and x86 architectures.
The Program Executive Office (PEO) of the US Army faces the challenge of modular and incremental deployment of software capabilities. The PEO Aviation (AVN) Enterprise has a platform entitled “Aviation Mission Computing Environment” (AMCE) and is developing its Component Specification Model (CSM).
The AMCE CSM comprises configurable processing, Software Operating Environment (SOE), and software loading requirements. In May 2023, a paper proposed definitions for software modules, operating system properties, and key technologies for two distinct SOEs:
- A mission system SOE
- A safety-critical SOE intended to address the Army Aviation Airworthiness Release (AWR)
This collaborative paper was developed by companies that include Collins Aerospace, JHNA, Lynx, Parry Labs, RTI, and US Army PEO.
The safety-critical SOE typically includes a Type-1 hypervisor with a Real-Time Operating System (RTOS) that consists of the language run-time, component framework, configuration services, and the FACE Transport Services Segment (TSS) that instantiates lower-level software services in line with other Enterprise Architecture Common Services.
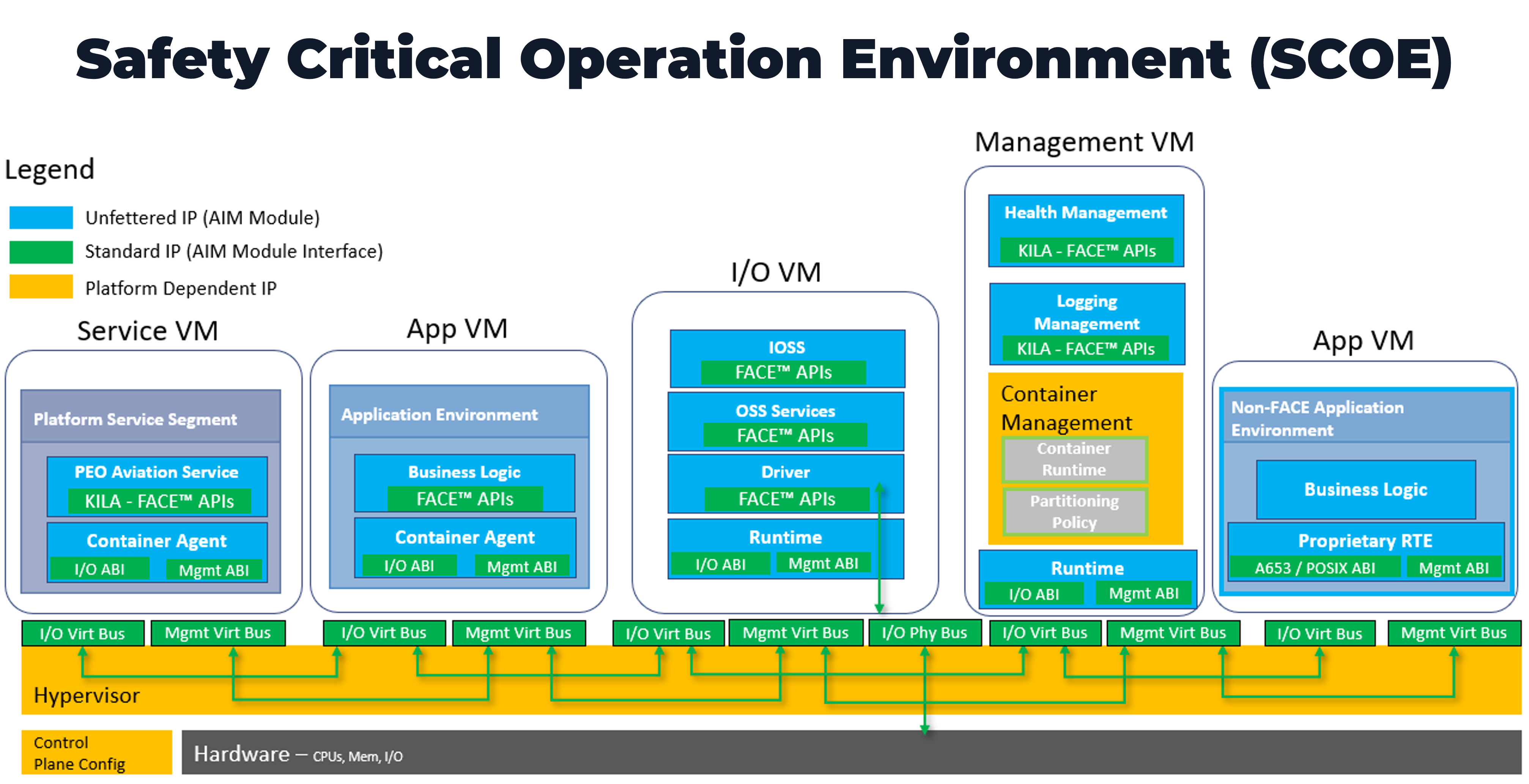
The team asserts that the safety-critical SOE must also define a Health Monitor in the FACE I/O Services Segment (IOSS) and an ARINC 653 VM API. If multicore processor hardware is used for the safety-critical SOE, IMA’s “robust partitioning” must be achieved, and the effects of interference channels must be mitigated in accordance with CAST-32A or similar guidance.
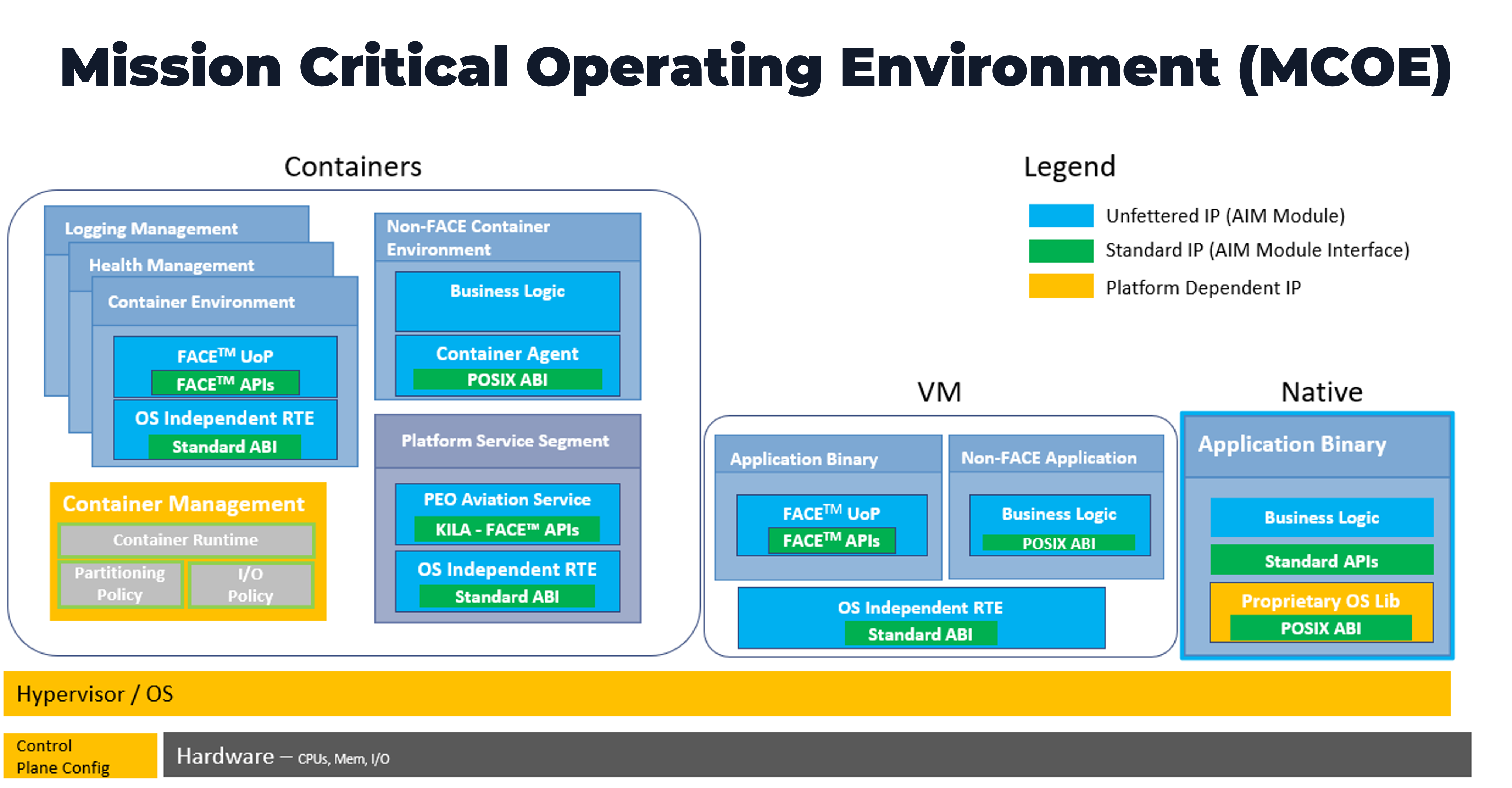
The computational subsystem containing a mission-critical SOE requires an operating environment that can rapidly integrate capability. As shown below, due to the relief in certification requirements, the operating system replaces the hypervisor in the Safety Critical System and allows the use of Symmetric Multicore Processing (SMP) at the OS level. It is then possible to use native containers, the general-purpose operating system or the hypervisor to provide the partitioning needed for DAL D-E mission capability application separation.
|
The Vertical Flight Society is distributing the paper so we cannot provide a copy here. If you have issues tracking it down via that path, feel free to contact us here and we will happily point you in the right direction.
We are excited about the direction in which this is headed. There is a lot more work to do in fleshing out the next level of detail and we are committed to keeping interested parties apprised of the progress in the coming quarters and years.

|

|

 Ian Ferguson | VP Marketing
Ian Ferguson | VP Marketing