Multicore
Who Needs a Hypervisor?
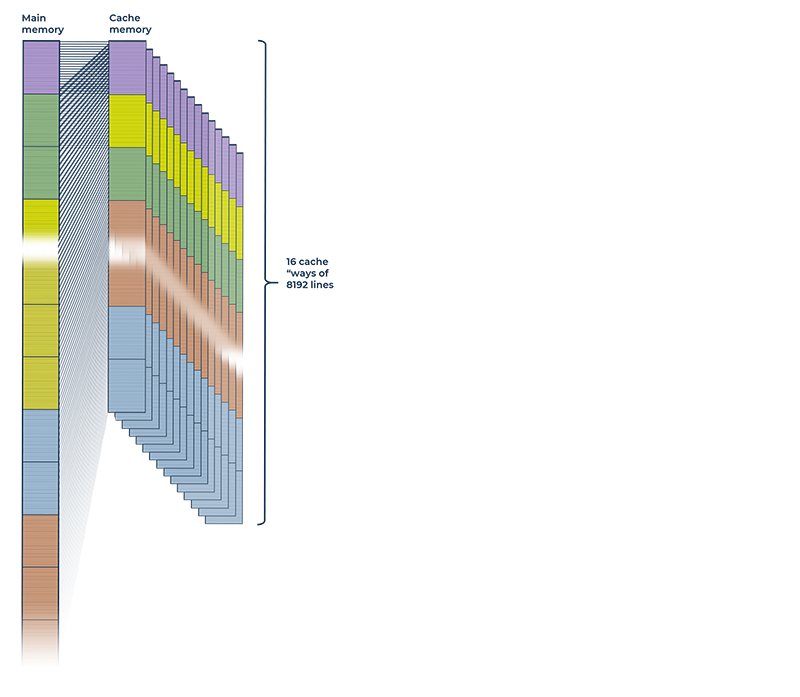
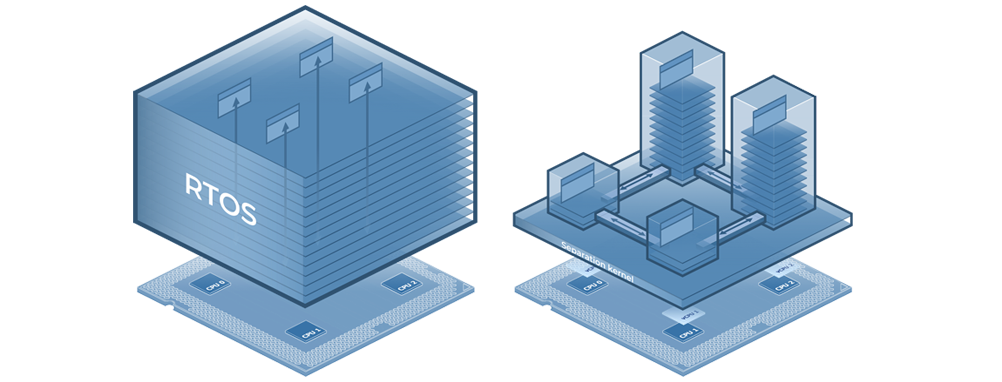
What is Cache Coloring and How Does it Work?
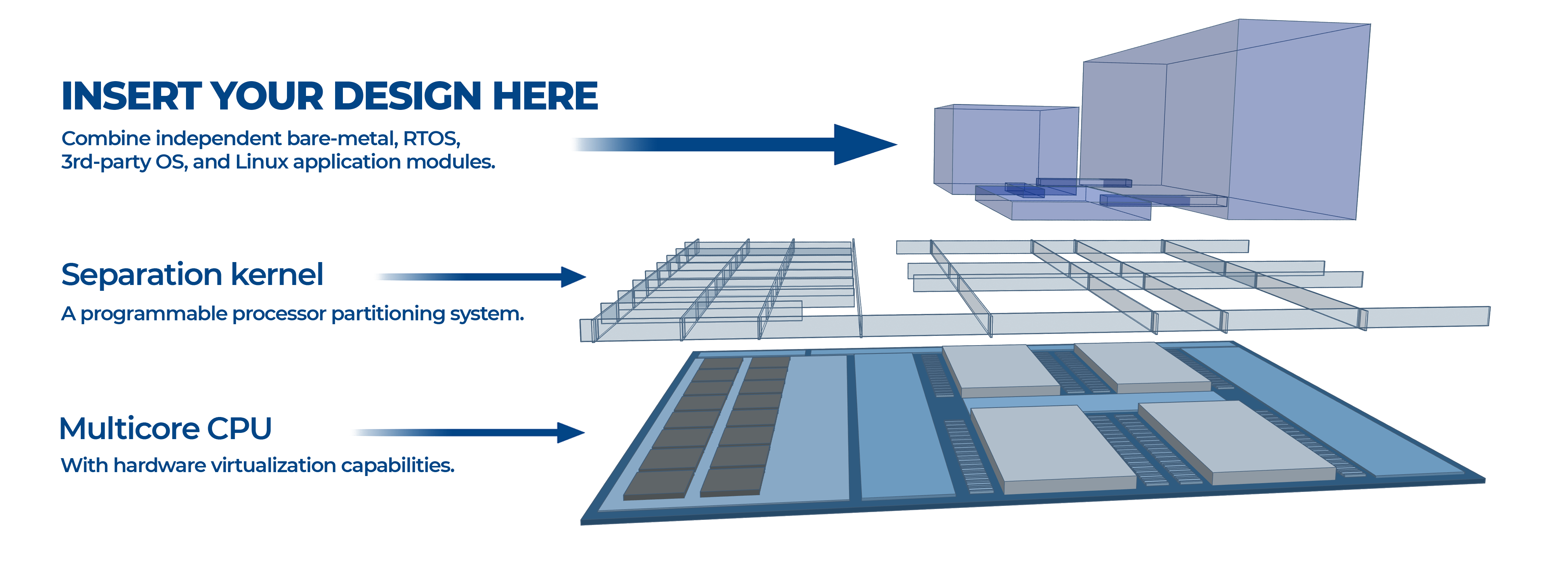
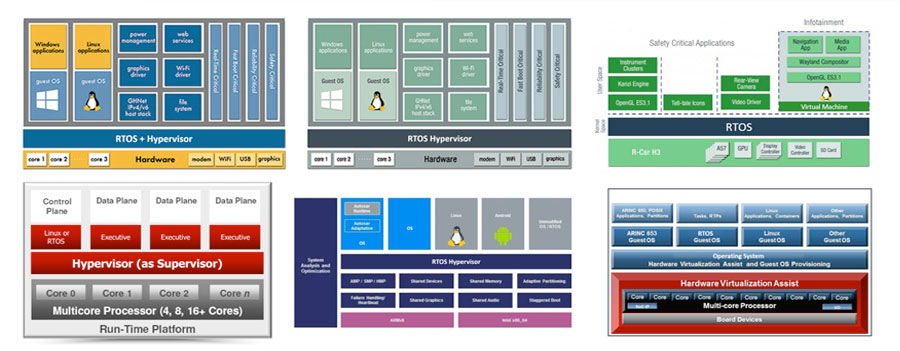
On reference architectures
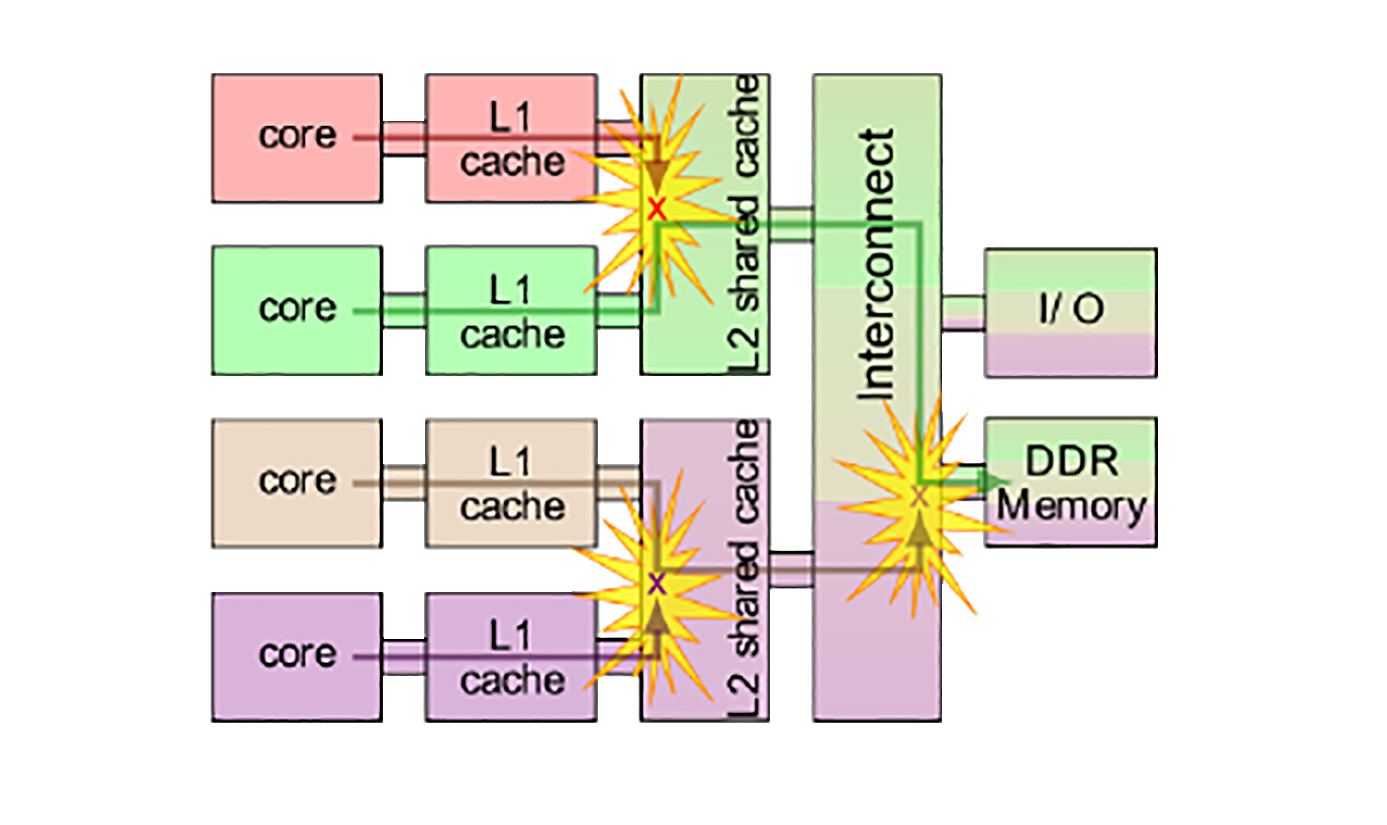
Challenges Building Safe Multicore Systems
What Are the Most Popular Real-Time Operating Systems in 2024?
Do You Need a Real-Time Operating System?
Embedded Best Practices at Arm Tech-con
How to Choose a Real-Time Operating System