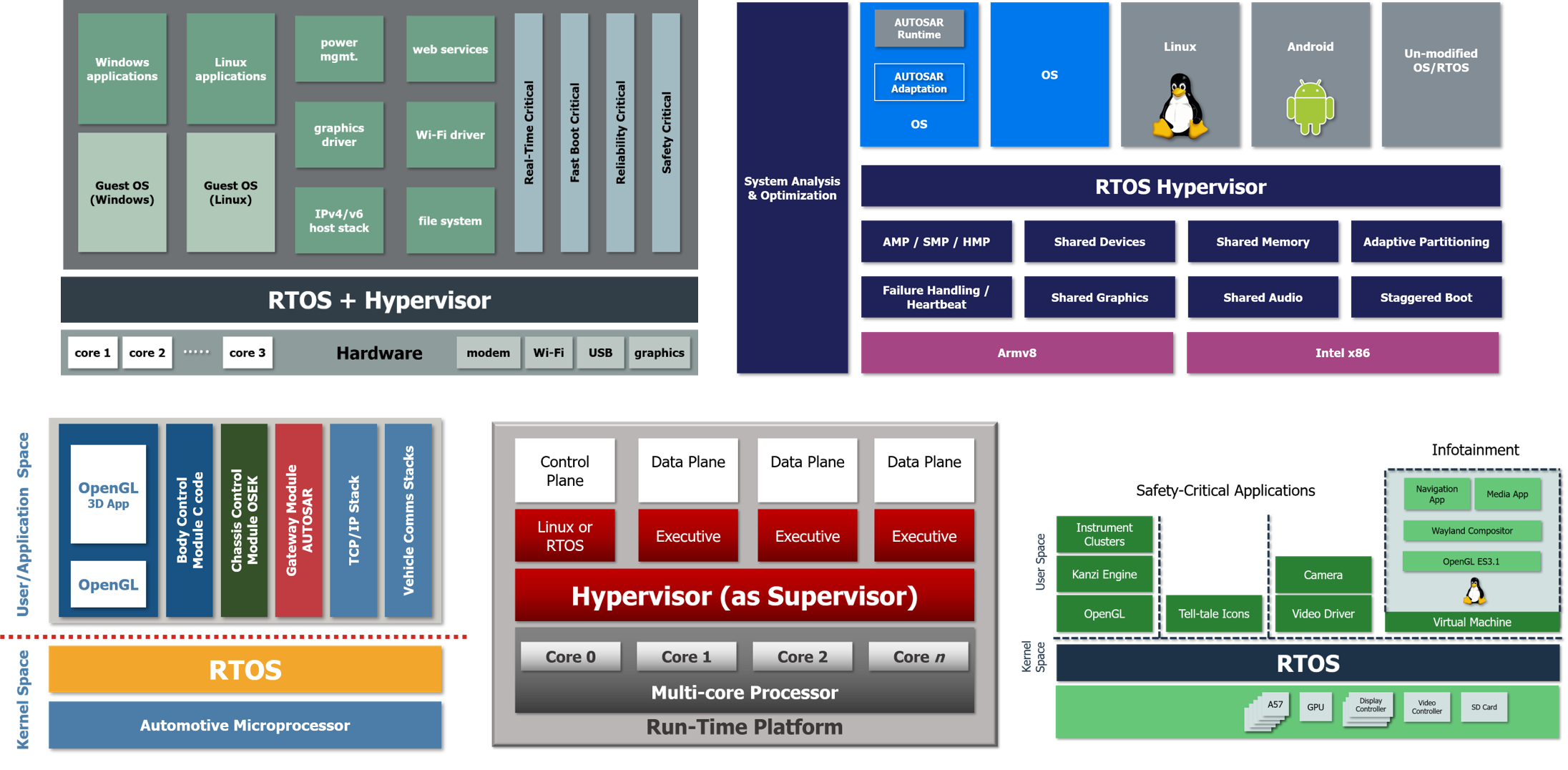
Who Needs a Hypervisor?
What is Cache Coloring and How Does it Work?
Intel’s first DO-254 hardware certification evidence – it’s on a MultiCore
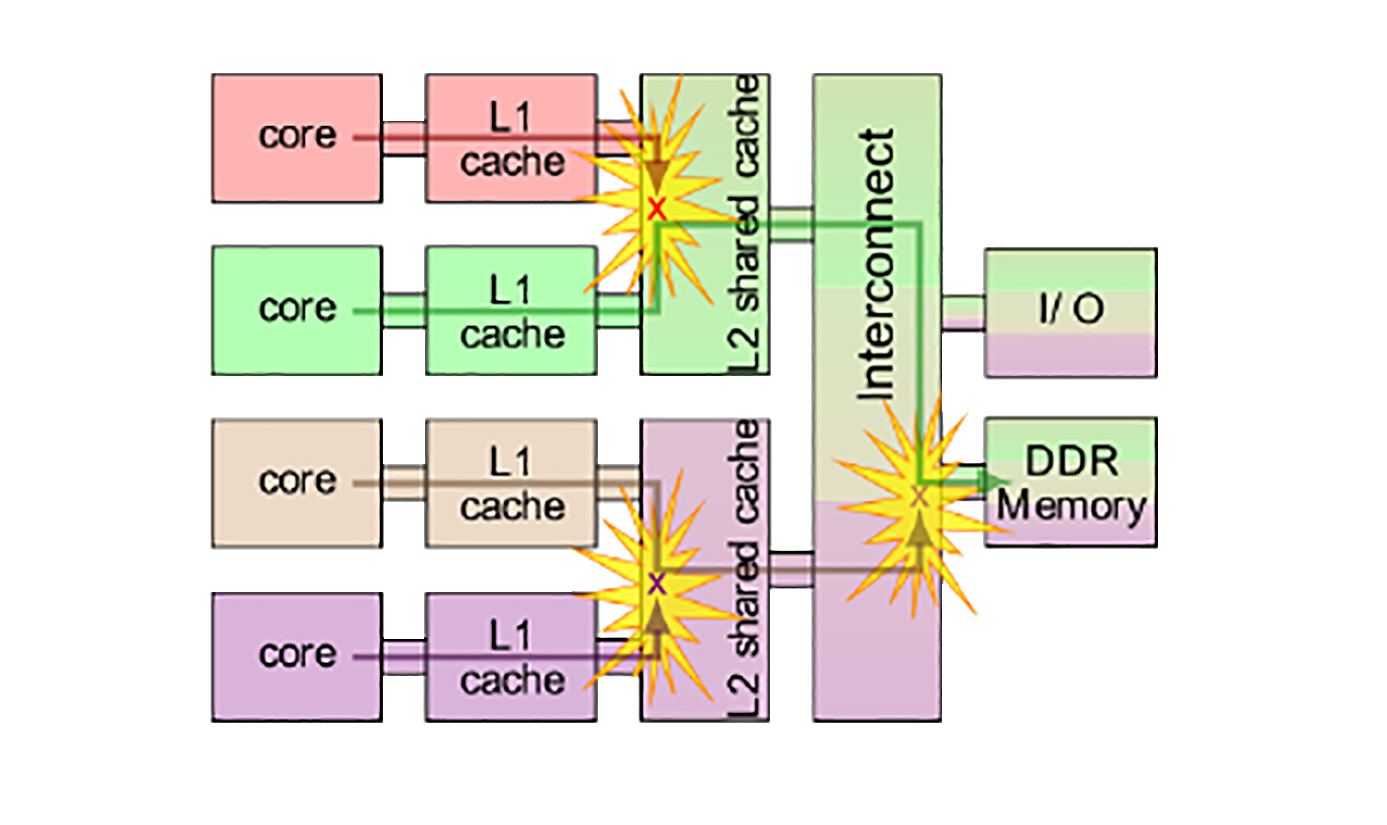
Challenges Building Safe Multicore Systems
What Is A Separation Kernel?

Field Notes: Safety-Critical Systems Symposium 2020
What Are the Problems with Embedded Linux?

Overarching Properties: An Alternative to DO-178