
Multi-core

TC-16/51: Adding Bottom Up Interference Analysis for MCPs

Lynx & ENSCO Demonstrate Avionics Solutions at DSEI JAPAN 2019
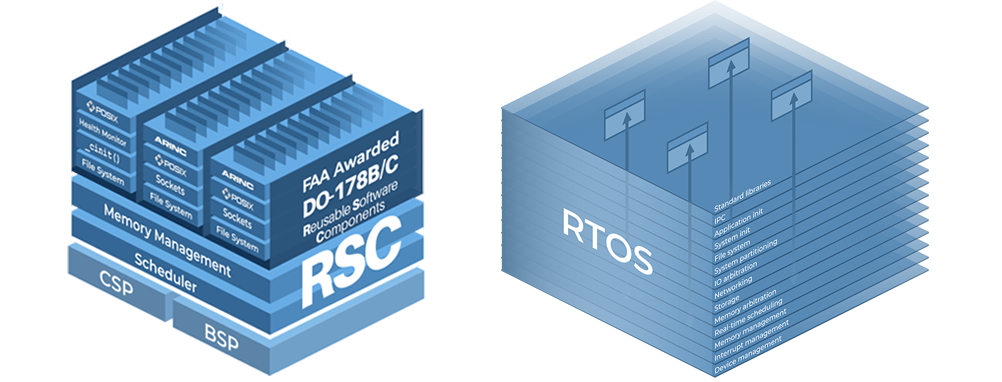
How to Choose a Real-Time Operating System

Realizing modern Automotive Software Environments
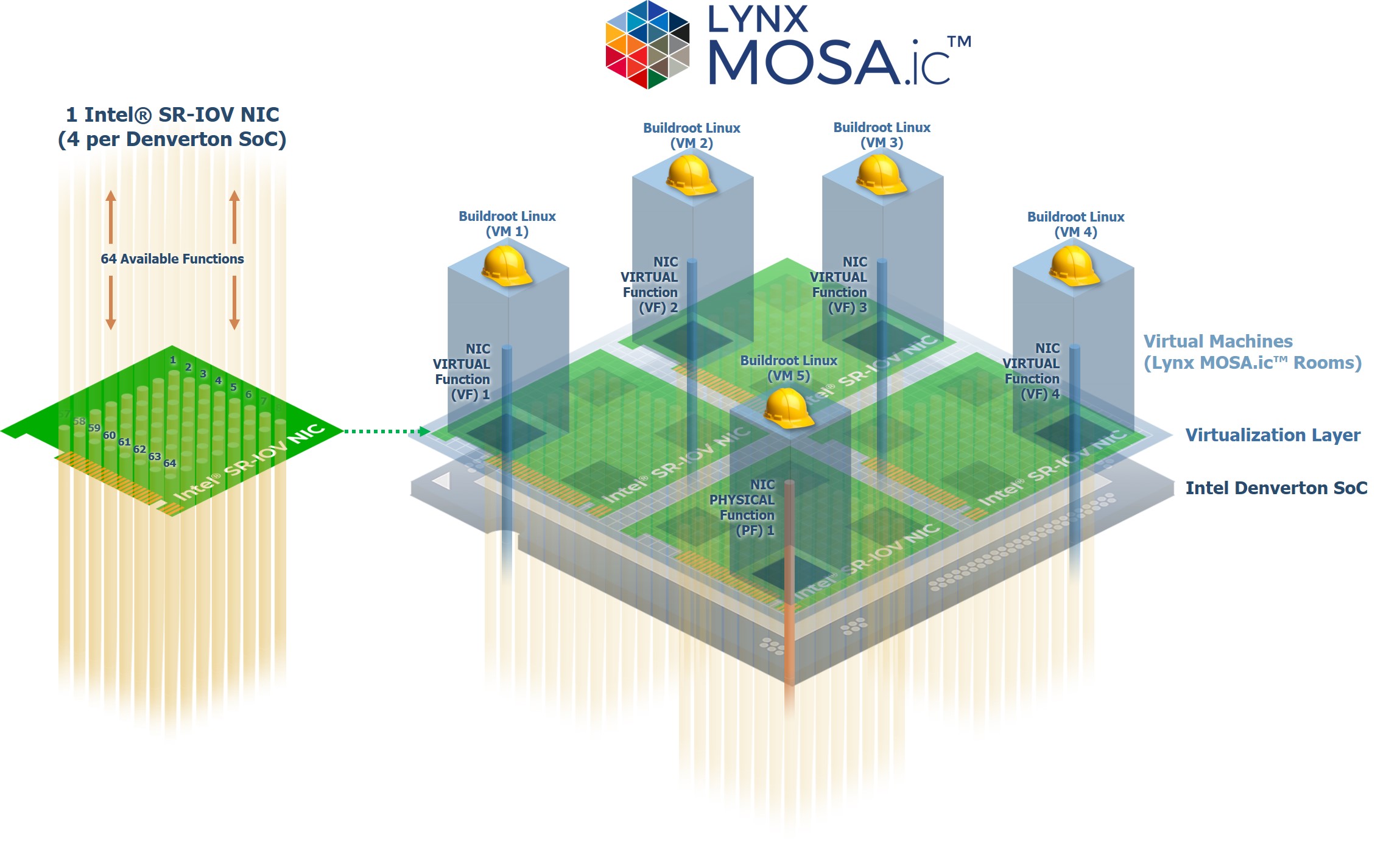
What is SR-IOV and Why is It Important for embedded devices?
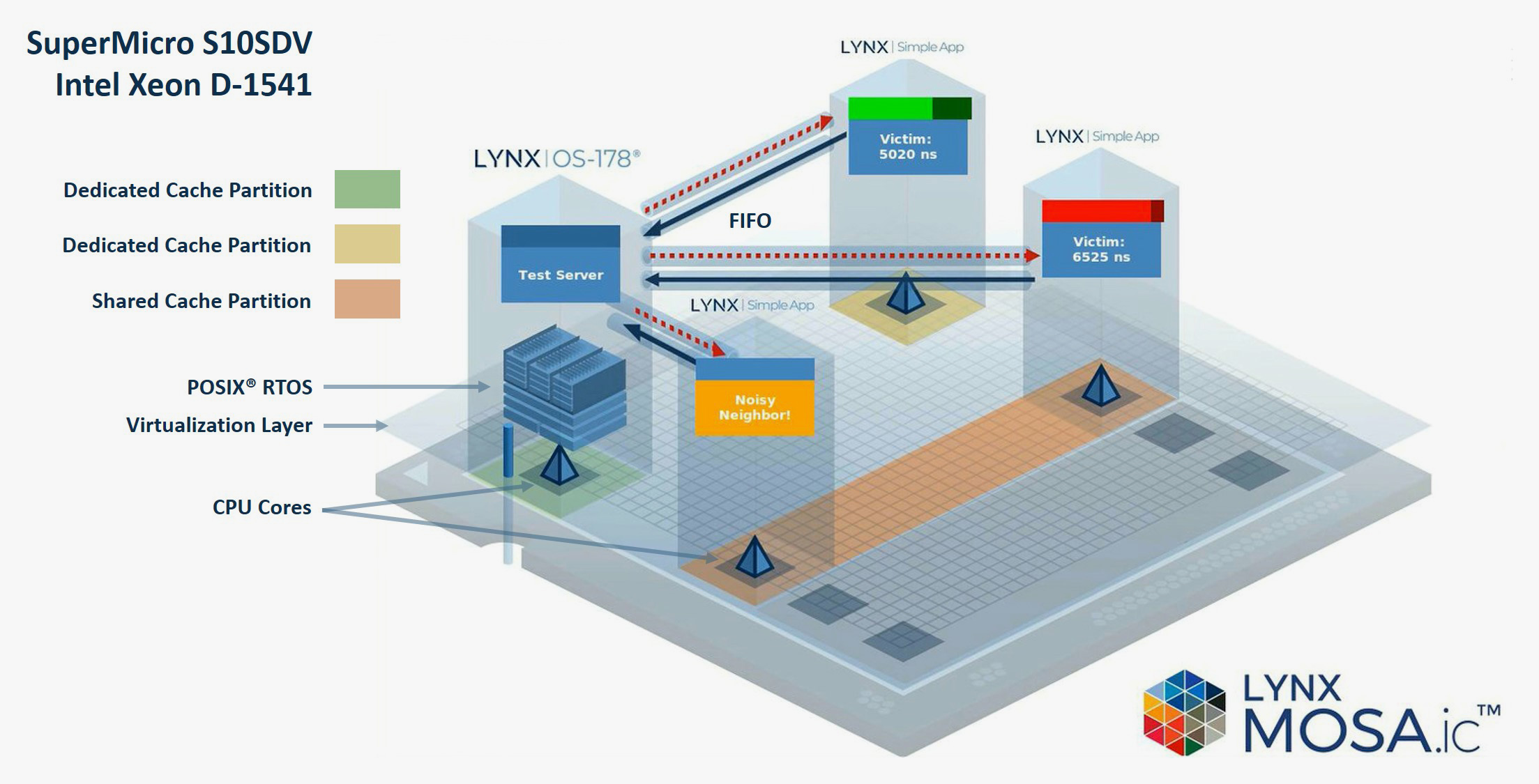
Multi-core cache allocation technology (CAT) demo
