


BUSINESS BENEFITS
- Most cost- and time-effective path to create certifiable mission-critical systems from Linux development
- Lowest certification costs for Arm, PowerPC, and x86 multicore architectures
- Reduced vendor lock-in


DEVELOPMENT BENEFITS
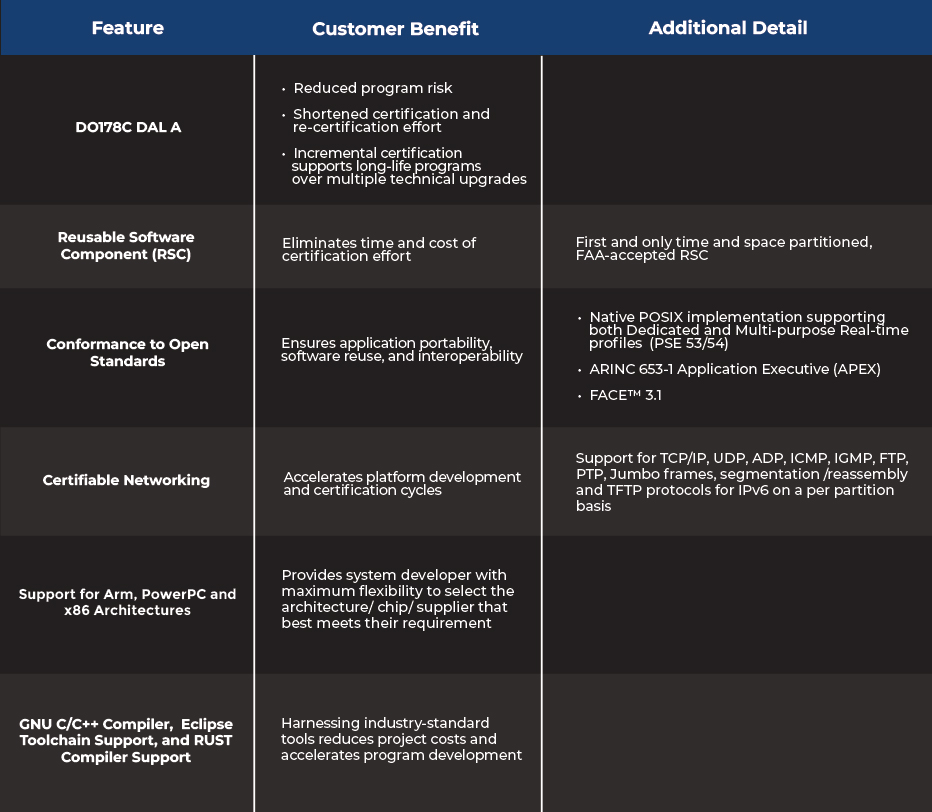
- Compatible with ARINC, FACE, and POSIX standards
- Certified multiple times to DO-178 DAL A, including an IPv6 networking stack
- Awarded Reusable Software Component (RSC) certificate from the FAA to simplify the path to reuse software across projects
LOWER PROJECT RISKS AND INCREASE SAFETY
Many companies are using Linux-based PCs to create their application software for embedded systems. LynxOS-178 has the strongest alignment to the POSIX APIs (PSE 53/54 profiles supported) across all suppliers of real-time operating systems (RTOS), which simplifies the migration of real-time and/or safety certifiable software to an RTOS.
LynxOS-178 supports x86, Arm, and PowerPC multicore processors. This RTOS is available as part of the LYNX MOSA.ic software framework or available to run directly on hardware.
LynxOS-178 is specifically designed to fulfill the stringent needs of multi-thread and multi-process applications in mission critical systems, providing security and safety through strict, hardware-enforced isolation between applications. This operating system has been certified multiple times to DO-178 DAL A. LynxOS-178 has been deployed in certified commercial and military avionics systems that have flown hundreds of millions of hours. As an RTOS for Integrated Modular Avionics (IMA), LynxOS-178 provides a robust and reliable platform.
LynxOS-178 supports x86, Arm, and PowerPC multicore processors. This RTOS is available as part of the LYNX MOSA.ic software framework or available to run directly on hardware.
LynxOS-178 is specifically designed to fulfill the stringent needs of multi-thread and multi-process applications in mission critical systems, providing security and safety through strict, hardware-enforced isolation between applications. This operating system has been certified multiple times to DO-178 DAL A. LynxOS-178 has been deployed in certified commercial and military avionics systems that have flown hundreds of millions of hours. As an RTOS for Integrated Modular Avionics (IMA), LynxOS-178 provides a robust and reliable platform.

CERTIFIED FACE CONFORMANT
The US Government is specifying use of open standards to reduce vendor lock-in. The MOSA standard specifies use of the FACE standard. Lynx supports v3.1, the latest version of the FACE standard.















.png?width=250&height=86&name=Wabtec-Corporation-White-(1).png)